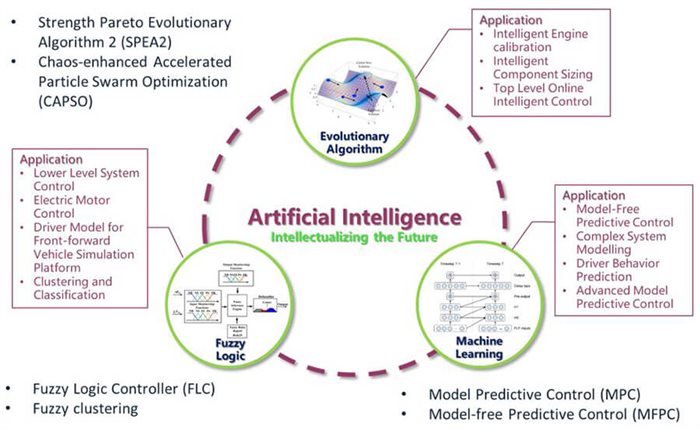
The team is dedicated to applications of artificial intelligence in future vehicles for more than 10 years. We have been fully exploring the optimization potential of the three major algorithms in engineering problems. These are fuzzy logic, evolutionary algorithms and machine learning. Their specific applications and achievements are as follows:
1. Fuzzy logic based development
(a) Dual-loop Online Intelligent Programming
- Dual-loop Online Intelligent Programming is proposed for PHEV energy management.
- Deep fuzzy predictor is created for vehicle velocity forecast via fuzzy granulation technology.
- The proposed DFP has the ability to differentiate driving behaviours at each driving state in real time. Its prediction result shows excellent accuracy with the lowest maximum error (2.22%), compared with the NNP (14.81%) and the FEP (4.81%).
- During real world driving, up to 9.37% total energy can be saved compared with the rule-based control strategy. The DP-based control strategy cannot work in this online environment.
- The computational time of the DOIP algorithm is investigated. It is feasible to operate the DOIP algorithm for 20s look-ahead horizon and computing resources still have a surplus.
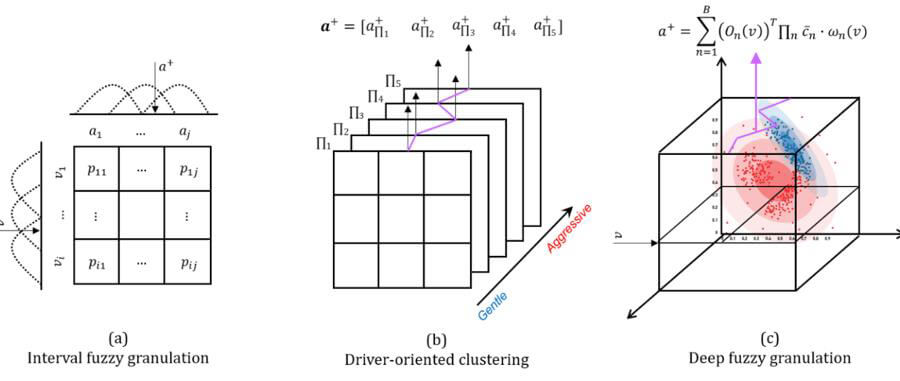 Fig. 3-1. Fuzzy granulation evolution for MC models
Fig. 3-1. Fuzzy granulation evolution for MC models
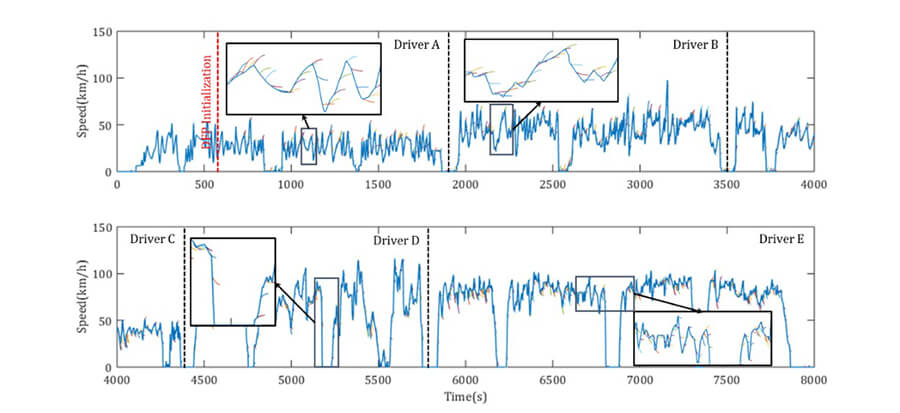 Fig. 3-2. Online prediction results over real-world driving
Fig. 3-2. Online prediction results over real-world driving
(b) Back-to-back competitive learning mechanism
- During the study case of this research, the proposed mechanism has an ability to adapt to the change of driving behaviours and performs 957 updates of the MF parameters in the FL-based control system.
- Under different initial SoC conditions (SoC=0.3/0.4/0.5), the FL-based control system driven by the proposed mechanism can significantly improve the fuel consumption when compared to less advanced control strategies (CD/CS and conventional FL-based).
- Compared to the CD/CS-based system, the improved FL-based control system reduces fuel consumption by at least 9% over the testing real-world cycle.
- Compared to the conventional FL-based system, the improved FL-based control system reduces fuel consumption by at least 7% over the testing real-world cycle.
- The 2-second observation window is best for learning from backward horizons achieving the lowest fuel consumption of 5.88 litres/100km, compared to the fuel consumption obtained when using other lengths of observation windows (1/3/4/5/10/20/30/40/50s).
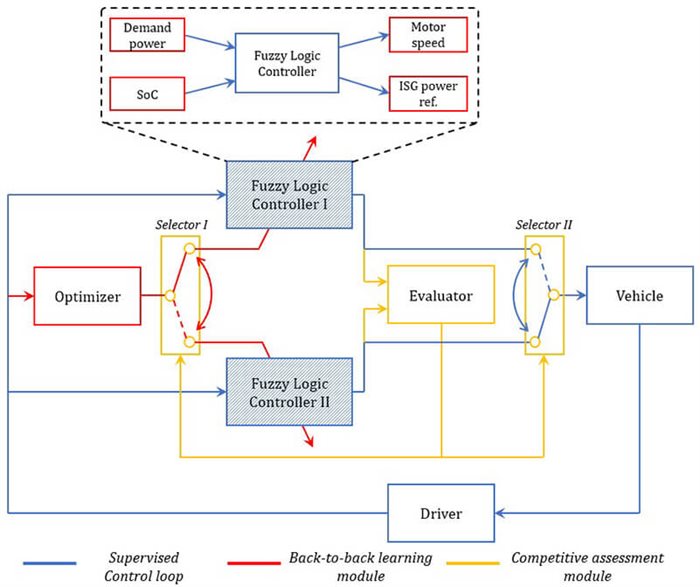 Fig. 3-3. Concept of back-to-back competitive learning mechanism
Fig. 3-3. Concept of back-to-back competitive learning mechanism
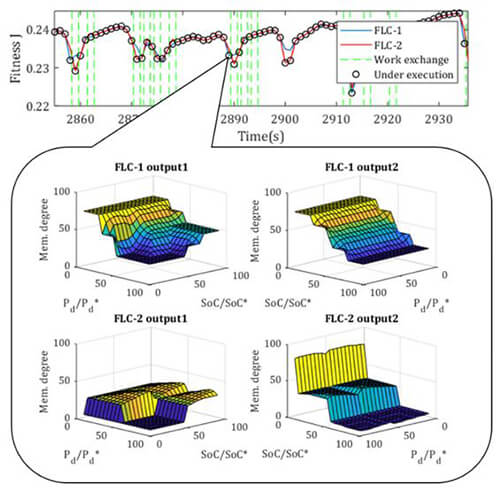 Fig. 3-4. Real-time performance boosted by the BCLM
Fig. 3-4. Real-time performance boosted by the BCLM
(c) Distributed Cooperative Energy Management System
- Compared to the conventional SP strategy, up to 8% energy can be saved over WLTC by using a SP strategy with personalized non-stationary inference, especially for very gentle drivers.
- Over the studied four personal driving cycles, generally, the driving style recognizer driven by type-2 fuzzy sets helps save 1.04% of energy compared to that driven by type-1 fuzzy sets and save 2.64% of energy compared to that driven by threshold-based recognizer.
- In the survey scope of signal delay 0 - 2000 ms, signal delays of 200 ms and 1000 ms have the most sensitive scope on the energy consumption of the proposed system. Compared to no delay condition, an increase of equivalent fuel consumption varies from 0.14% to 1.91%.
- When the control signal is completely lost, energy-saving performance of the improved vehicle system is still higher than that of the ECMS (by 0.57%) and the conventional SP strategy (by 2.66%).
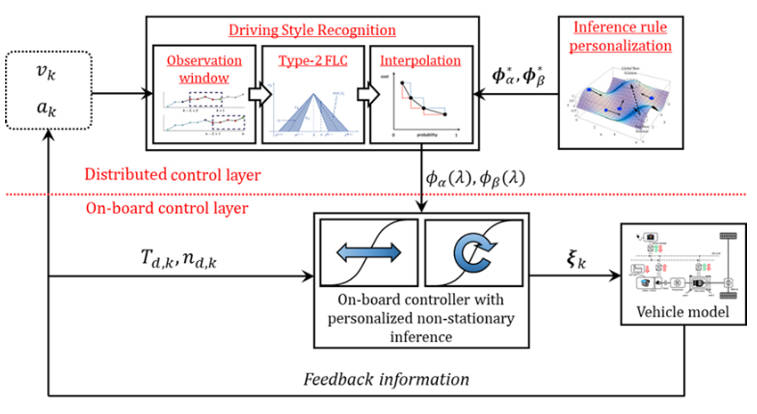
Fig. 3-5. The framework of the proposed distributed cooperative EMS
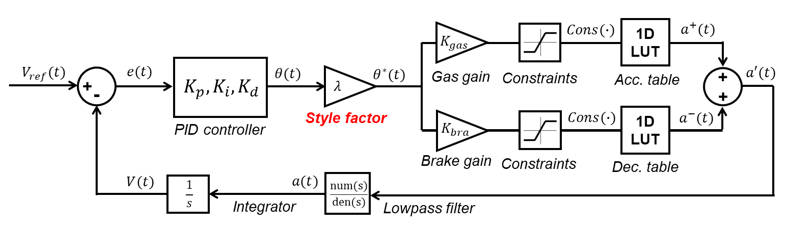
Fig. 3-6. The schematic diagram of the used driver sub-model
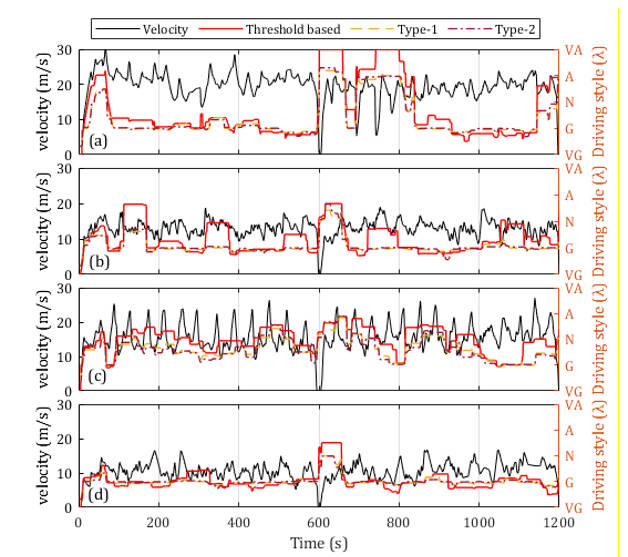 Fig. 3-7. Real-time performance of driving style recognition performance by using three driving recognition algorithms for: a) Driver A; b) Driver B; c) Driver C; and d) Driver D
Fig. 3-7. Real-time performance of driving style recognition performance by using three driving recognition algorithms for: a) Driver A; b) Driver B; c) Driver C; and d) Driver D
(d) AFR Controlling and Optimization of GDI engines
- A discrete fuzzy logic PI controller proposed in this research has been proved with simple structure, easy tuning, excellent tracking performance, and high robustness.
- It has the same linear structure as that of the conventional PI controller, but has non-constant coefficient and self-tuned control gains (they are the nonlinear functions of the input signal);
- The controller is designed based on the classical discrete PI controller, from which the fuzzy control law is derived. Membership functions are simple triangular ones with fuzzy logic if-then rules.
- The controller can reduce the damping of oscillations occurring in the fuel injection system and improve the air/fuel ratio dynamic stability.
 Fig. 3-8. Research target Jaguar V6 GDI engine
Fig. 3-8. Research target Jaguar V6 GDI engine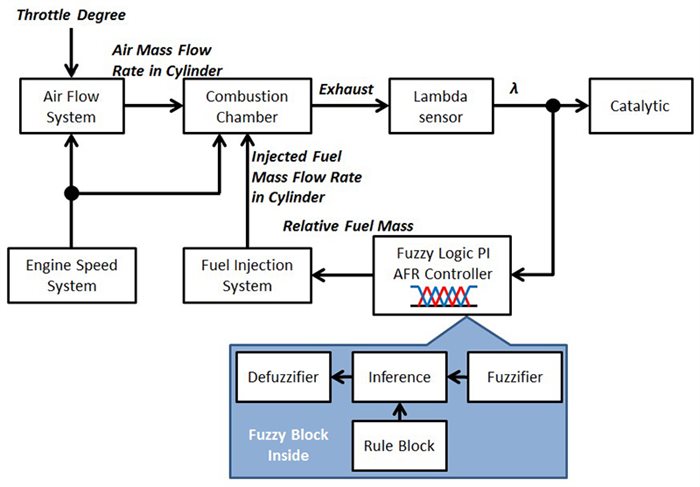 Fig. 3-9. Schematic diagram of AFR fuzzy control system
Fig. 3-9. Schematic diagram of AFR fuzzy control system
- The proposed MFO scheme uses CA approach and can visualise the relationship between engine step gain scenarios and designed MF patterns to precisely determine its scalar parameters for AFR regulation of GDI engines.
- According to the CA-based MFO, the customised MF has the more efficient adjustment in with its homogenization can keep trend characteristics of designed MFs while repairing the insensitive interval.
- A comparison is performed with a commonly PI controller at the absence of PI-like fuzzy control policy. The FKBC optimised by CA-based MFO outperforms the PI controller, in term of both ITAE and convergence time. At 8-10% step gain, the fuzzy logic strategy at most decreases ITAE and convergence time by 50.0% and 52.2% respectively.
- A comparative study with existing typical MF in the FLC indicates that, it is worth mentioning that the FKBC optimised by CA-based MFO can reduce ITAE up to 82% with 8-16% step gain compared to typical MFs.
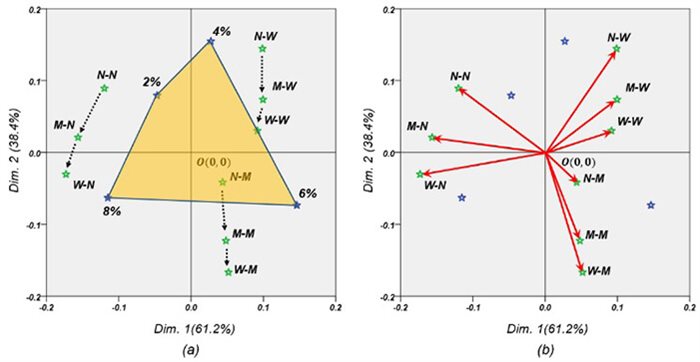 Fig. 3-10. Results of corresponding analysis
Fig. 3-10. Results of corresponding analysis
- An enhanced intelligent PI-like Fuzzy Knowledge Based Controller (FKBC) is developed;
- Chaos-enhanced Accelerated Particle Swarm Optimization (CAPSO) algorithm is applied for the transient calibration of controller parameters;
- An alternative time-domain objective function is applied for the transient calibration program without the need for prior selection of the search-domain;
- The real-time transient performance of the enhanced PI-like FKBC is investigated on the Air/Fuel Ratio (AFR) control system of a Gasoline Direct Injection (GDI) engine;
- The enhanced PI-like FKBC is able to reduce the settling time and oscillations more effectively with better efficiency and accuracy.
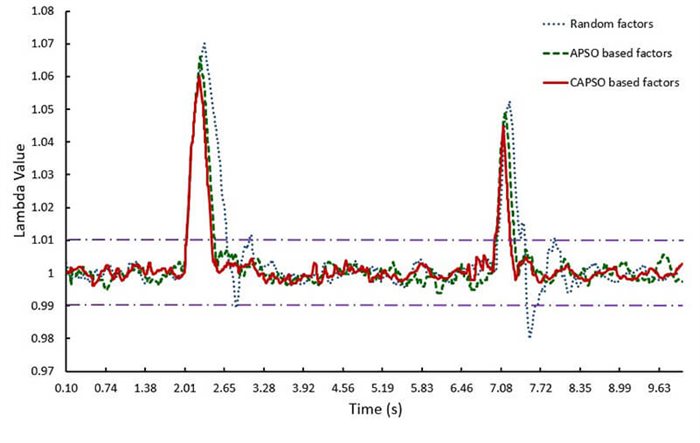 Fig. 3-11. Performance comparison of AFR regulation
Fig. 3-11. Performance comparison of AFR regulation
(e) Fuzzy-tree-constructed data-efficient modelling
- A new methodology of fuzzy-tree-constructed data-efficient modelling is proposed.
- Gaussian distributed resampling technique is developed for reducing experimental efforts.
- Experiments at steady engine operations are used to train and validate the fuzzy trees.
- The proposed methodology achieves superior learning efficiency with fewer samples.
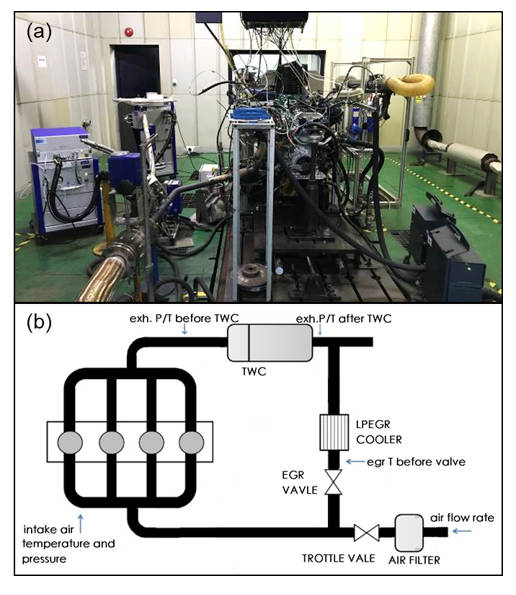
Fig. 3-12. Dedicated hybrid engine: a) testing bench and b) principal diagram
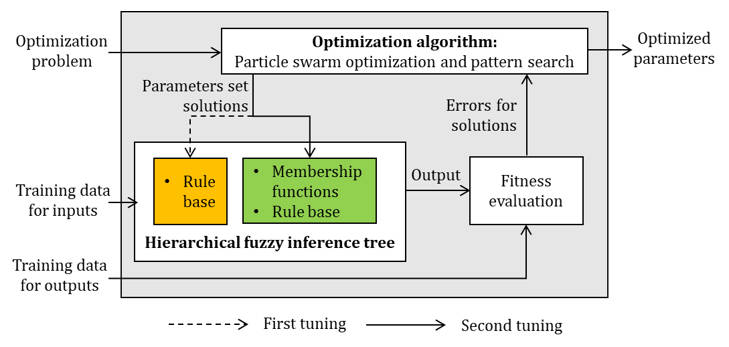
Fig. 3-13. Workflow of the two-step tuning process for HFITs
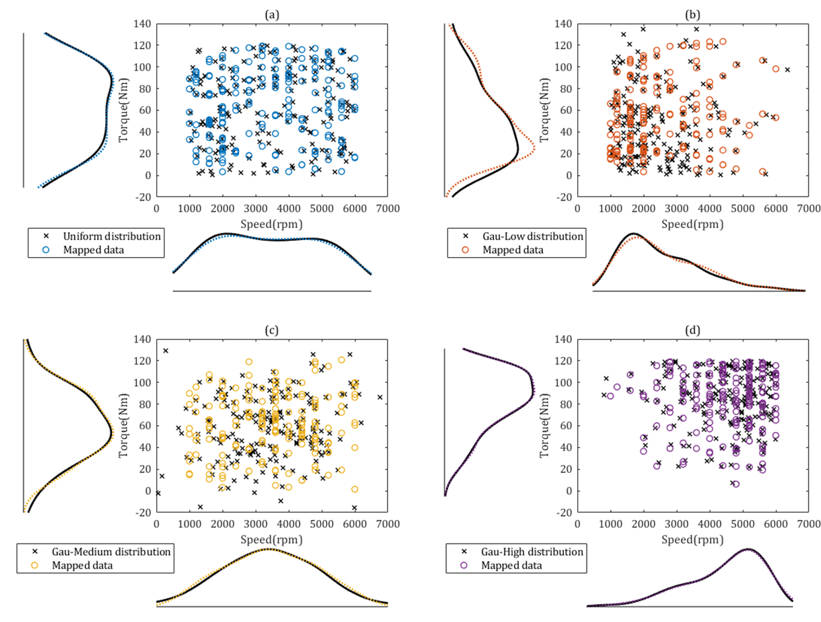
Fig. 3-14. Dataset distribution and mapping result after re-sampling
2. Nature-inspired Algorithm based Development
(a) Design optimisation and real-time control of HEVs
- A novel algorithm for hybrid electric powertrain intelligent sizing is introduced and applied.
- The proposed CAPSO algorithm is capable of finding the real optimal result with much higher reputation.
- Logistic mapping is the most effective strategy to build CAPSO.
- The CAPSO gave more reliable results and increased the efficiency by 1.71%.
 Fig. 3-15. Electrified off-road vehicles
Fig. 3-15. Electrified off-road vehicles
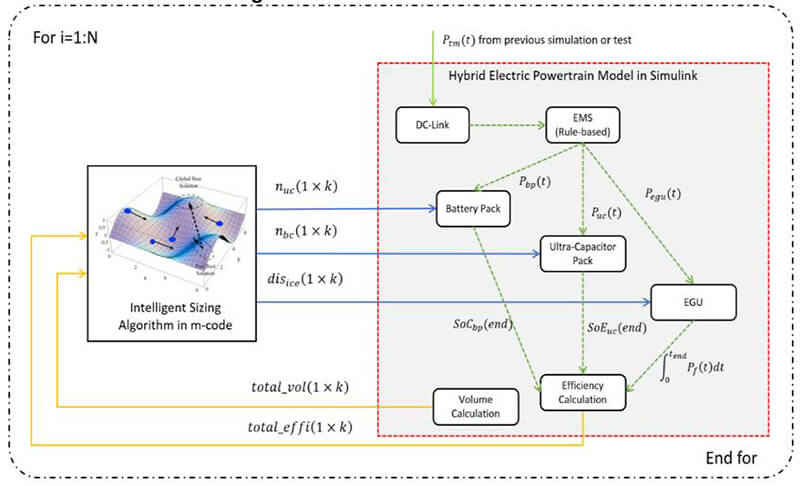 Fig. 3-16. Improved CAPSO algorithm interface
Fig. 3-16. Improved CAPSO algorithm interface
- The proposed has the capacity of finding global optima with much faster computing speed comparing with GA.
- The OSIP can optimize the vehicle performance in real-time with a maximum prediction horizon size of 35s.
- The vehicle with OSIP outperforms the system without it in energy saving at all initial battery SoC level, and it has more potential in fuel saving when initial battery SoC is high.
- The proposed energy management method is robust and reliable, and up to 17% fuel and 13% total energy loss can be saved via the proposed cyber-physical control.
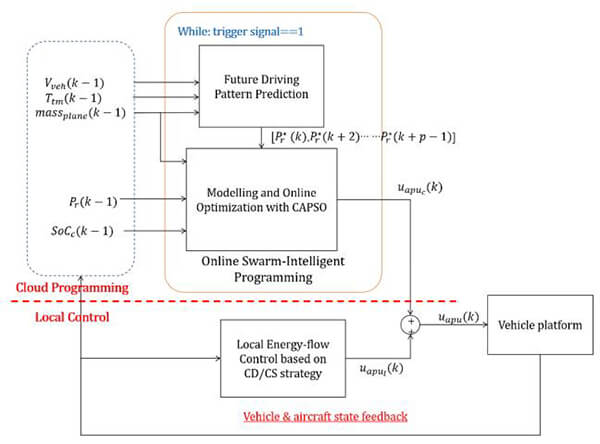 Fig. 3-17.
Fig. 3-17. workflow of swarm intelligent optimization programming
(b) Multi-objective Optimization of V2V-based Cooperative Driving
Multi-objective optimization of the V2V-based cooperative driving and hybrid energy management, involving both the external vehicular dynamics and the internal powertrain dynamics.
This study implemented and compared two optimization methods, Pareto and weighted sum, to simultaneously improve energy consumption, tracking capability and ride comfort.
The optimized control scheme can provide significant reduction regarding tracking error (by ~ 70 %) and energy consumption (by ~ 8 %) under various driving conditions, while at the same time satisfy ride comfort need.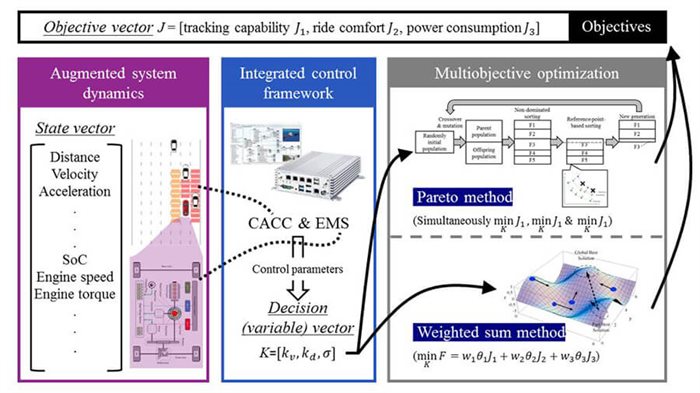 Fig. 3-18. Multi-objective optimization with Pareto and weighted sum methods
Fig. 3-18. Multi-objective optimization with Pareto and weighted sum methods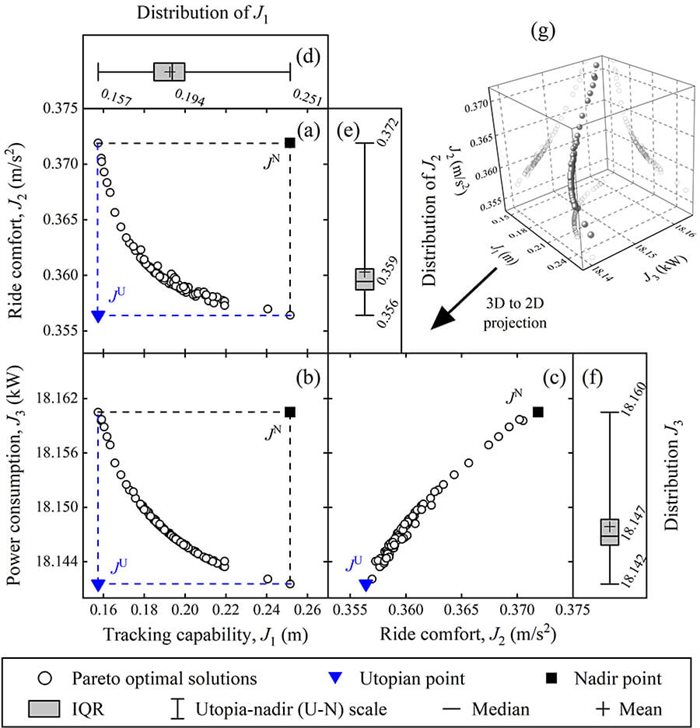 Fig. 3-19. Pareto optimal results for 5*WLTC driving cycle
Fig. 3-19. Pareto optimal results for 5*WLTC driving cycle
(c) Intelligent Calibration of a Dual-loop EGR Controller
- A novel calibration method for the controllers on diesel engine is introduced and applied;
- The intelligent tuning method based on CAPSO could reduce the overshoot by at least 59.9% and reduce the settling time by at least 35.4% when compared with the baseline setting. A 0.69% drop of the BSFC result is found when comparing the TMPC controller with the PID controller during transient scenarios
- The proposed calibration algorithm is capable of finding the real optimal result with much higher reputation.
- The experiments prove that these improvements through the proposed calibration method could be reappeared on a real engine.
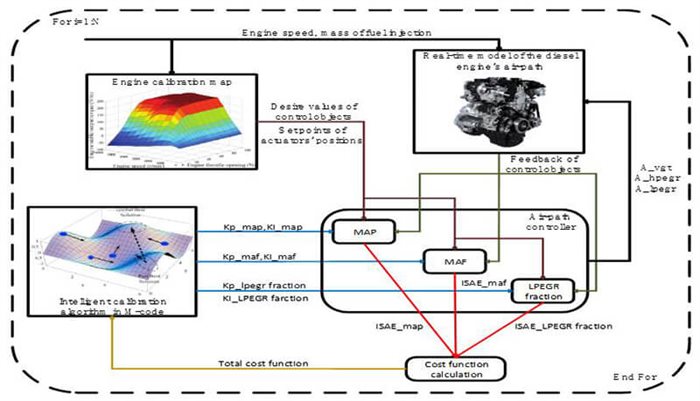 Fig. 3-20.
Fig. 3-20. Algorithm interface
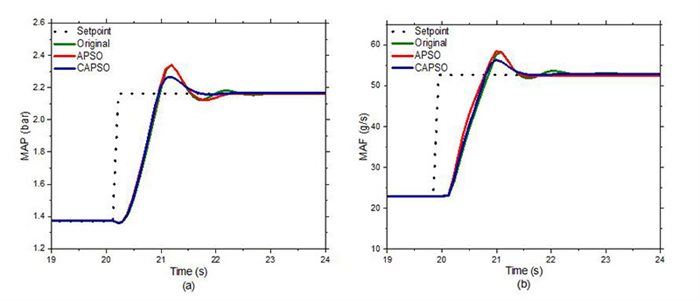 Fig. 3-21.
Fig. 3-21. HiL results
(d) Engine Modelling and Optimal Feedback Control
- A new computational intelligence approach to calibrate internal combustion engine without the need to an engine model or massive test bench experimental data is developed;
- The Strength Pareto Evolutionary Algorithm 2 (SPEA2) is applied to this automatic engine calibration process;
- The developed calibration approach can automatically find the optimal engine variable set which can provide the best fuel consumption and PM emissions, with good accuracy and high efficiency;
- The developed calibration approach can improve the automatic level and reduce the time for engine calibration process dramatically.
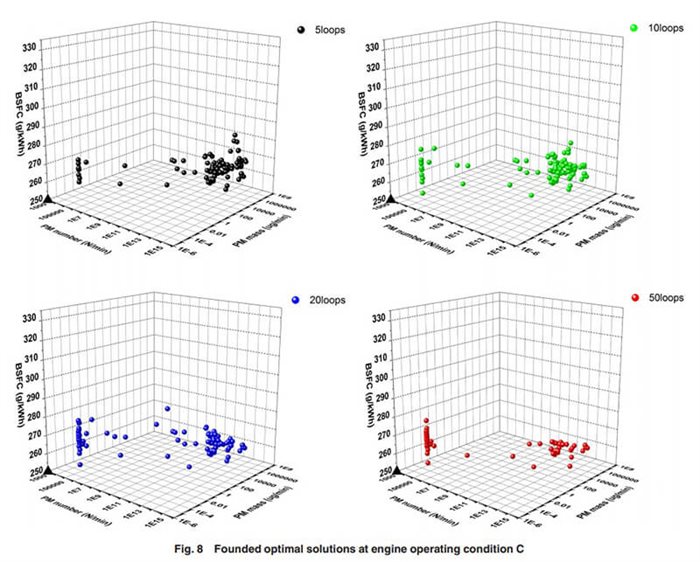 Fig. 3-22. Found optimal solutions
Fig. 3-22. Found optimal solutions
(e) Pedestrian-Aware Supervisory Control System Interactive Optimization
- The developed fuzzy adaptive cost map can activate fixed weights of sub-maps and enable the self-regulation of inter-objective weights based on the pedestrian density of the testing scenario.
- 14.42% mass of exhaust emissions can be reduced for the involved pedestrians with help of the proposed approach, compared to only considering fuel consumption in mapping treatment.
- The modified BA for the interactive optimization shows the ability to achieve the highest success rate (86/90), which exhibits a superiority in control optimization of connected HEVs, compared to the two baselines: genetic algorithm (79/90) and particle swarm optimization (13/90).
- The proposed bootstrapped deviation technique makes it up for better fuel economy () and lower emissions () to the pedestrians, compared to the bootstrapped mean one.
- When the signal is completely lost, the proposed system (with relative low mass of total emissions and the lowest fuel consumption) still has strong robustness, where the only thing changed is the system benefit has been transited from pedestrians to the car owner.
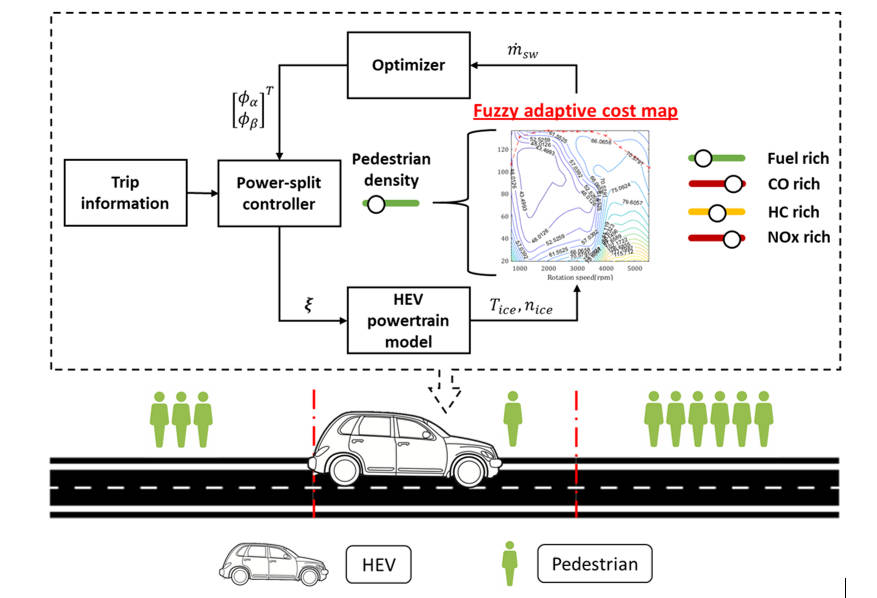
Fig. 3-23. Schematic diagram of interactive optimization for the pedestrian-aware supervisory control system
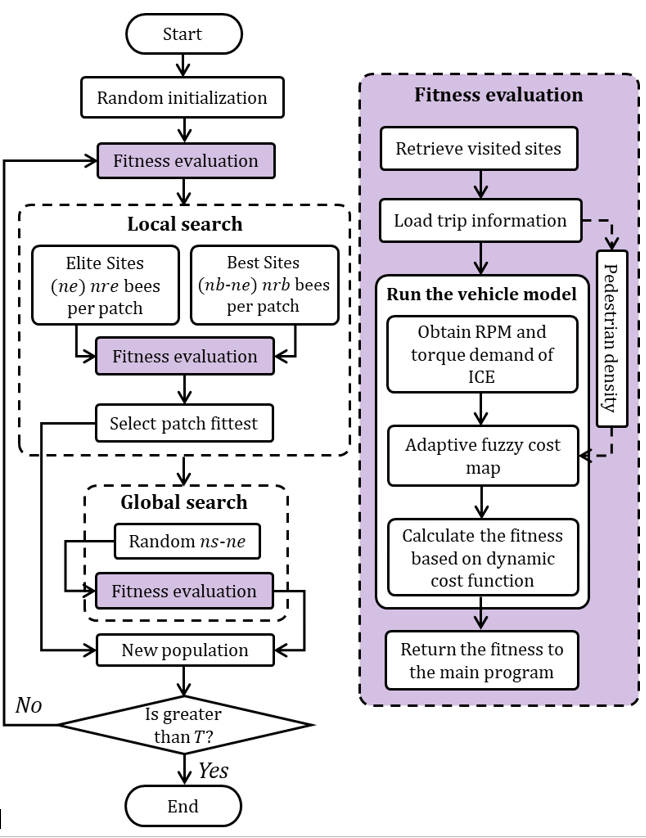
Fig. 3-24. Flowchart of BA-driven interactive optimization
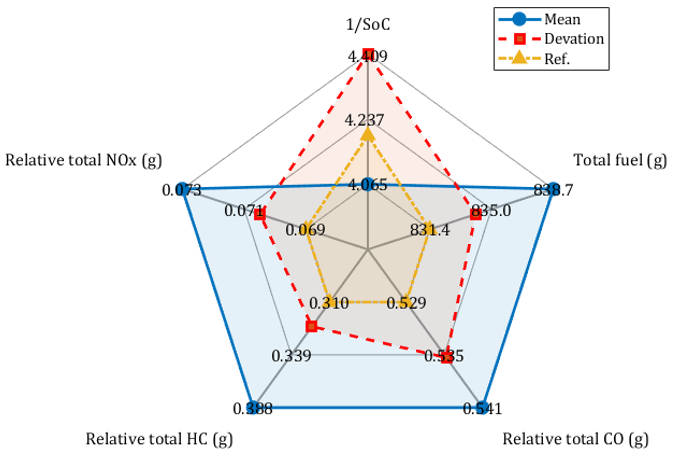
Fig. 3-25. The overall performance comparison improved by using two BS techniques
3. Machine Learning based Development
(a) Model-Free Predictive Energy Management
- Model-free predictive energy management method can improve the vehicle efficiency from increasing 1) the learning time from real-world interaction and 2) the prediction step length;
- The proposed learning strategies can optimise the control policy in real-time with a maximum prediction step size of 65;
- R2T learning strategy is the most effective n-step reinforcement learning strategy for model-free predictive energy management, which outperforms other proposed strategies in terms of same prediction step length and full performance in real-time;
- The proposed model-free predictive energy management method is robust and reliable for energy saving and it outperforms the conventional model-based method by saving up to 14% energy.
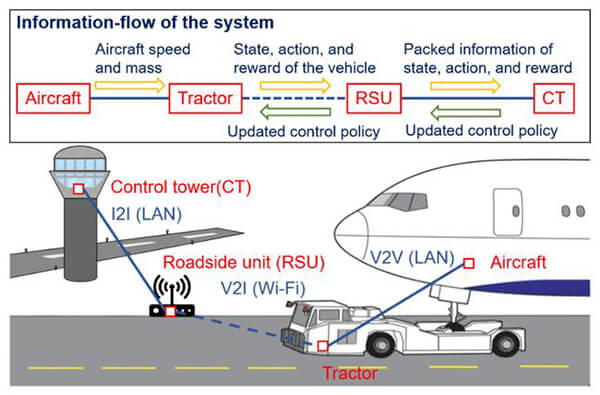 Fig. 3-26.
Fig. 3-26. Aircraft towing scenario with V2X communication
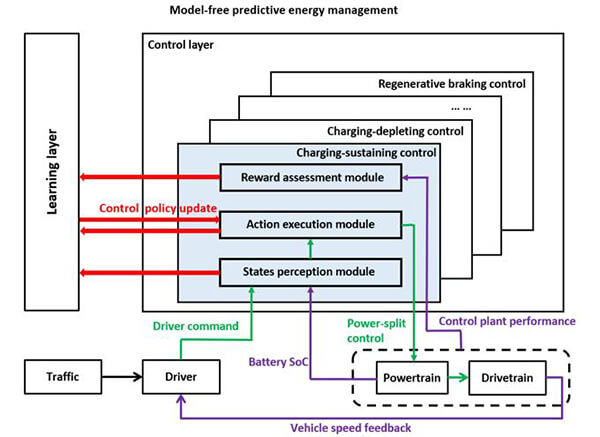 Fig. 3-27.
Fig. 3-27. Distributed control framework for model-free control
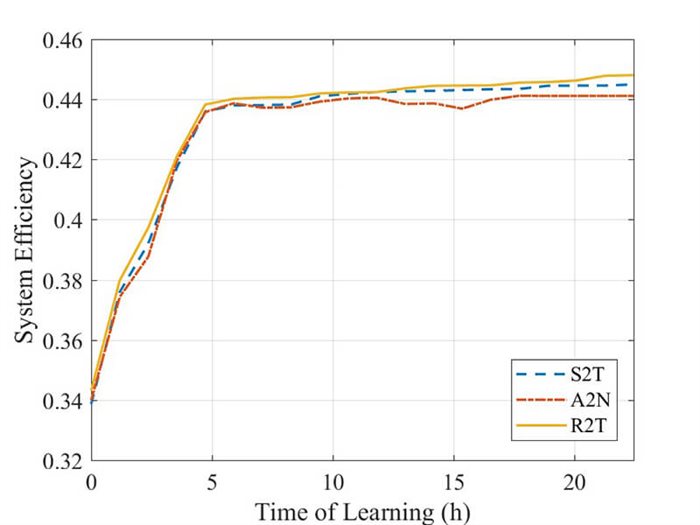 Fig. 3-28. Self-learning process
Fig. 3-28. Self-learning process
(b) Double-Q Learning based Energy Management
- Charge-sustaining control strategy is optimised online with double Q-learning;
- Two action execution policies are proposed for overestimation prevention;
- The random execution policy is shown the most effective and stable action execution policy;
- The method can save energy by more than 4% in selected real-world driving conditions.
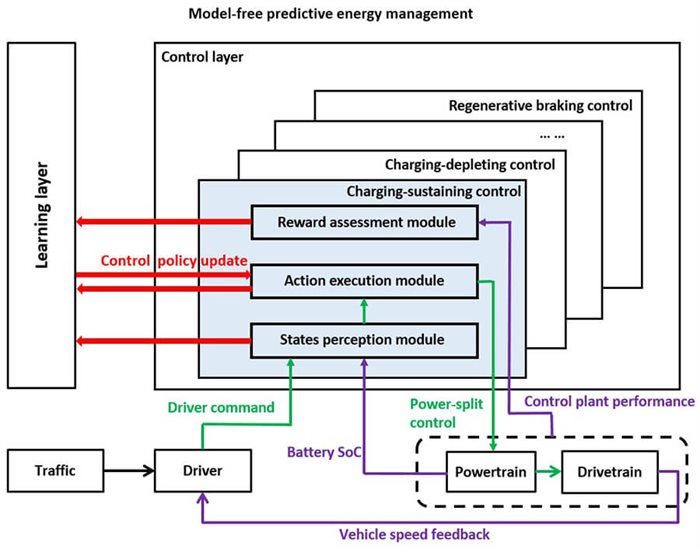
Fig. 3-29. Layered control framework for model-free charge-sustaining control
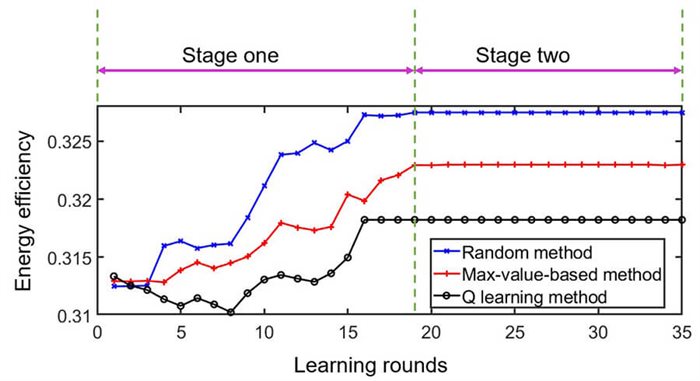 Fig. 3-30. Learning performance of three control strategies
Fig. 3-30. Learning performance of three control strategies
(c) Transferable representation modelling for real-time energy management
- A transfer learning routine is proposed to reduce workload in control development.
- Fuzzy learning and Gaussian process regression are incorporated in a control model.
- Fuzzy learning achieves 27% higher distinction rate than a neural network.
- The ‘deeper’ architecture outpefroms the ‘broader’ one in transfer learning.
- Real-time control functionality is verified by hardware-in-the-loop testing.
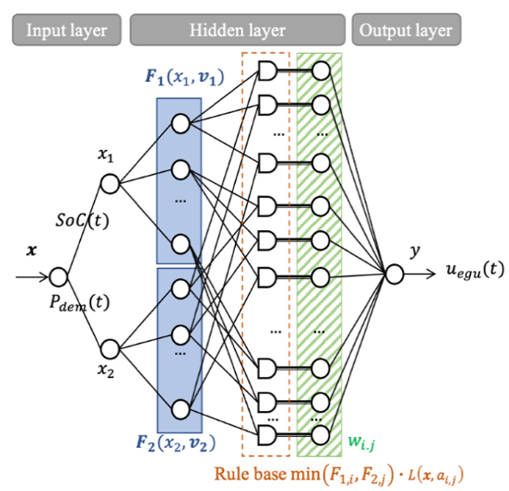
Fig. 3-31. Takagi-Sugeno fuzzy model for energy management.
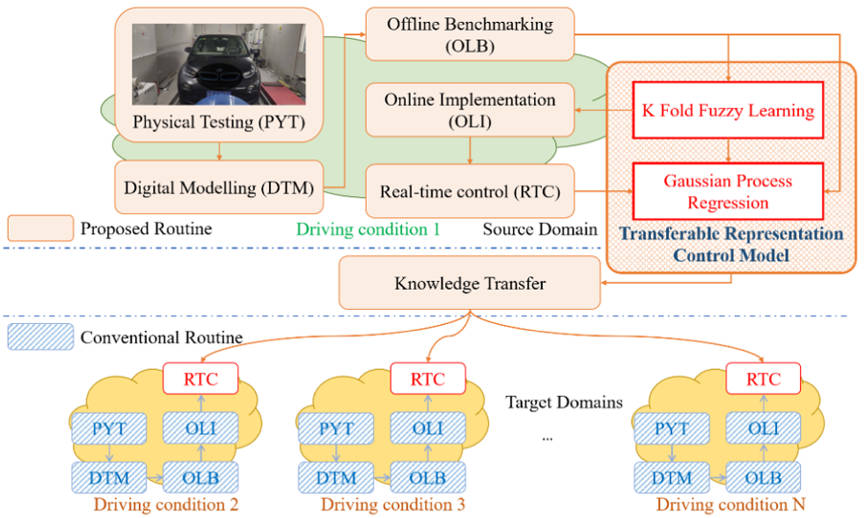
Fig. 3-31. The transfer learning routine for development of energy management controller.
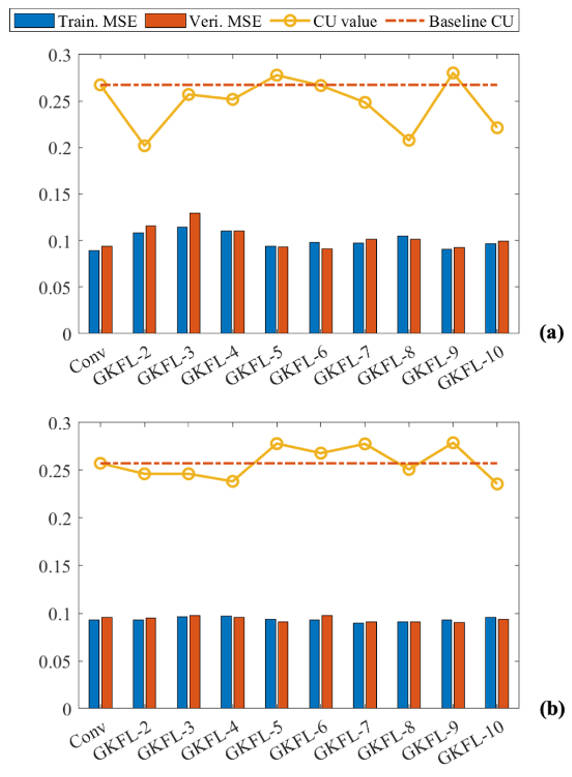
Fig. 3-33. Local learning performance under the Ex-WLTC cycle using (a) GA and (b) PSO algorithms.
(d) Knowledge Implementation and Transfer with an Adaptive Learning Network
- The proposed GKFL for building ANFIS network is effective in the implementation of offline optimization knowledge. The highest CU has been achieved with ninefold fuzzy learning for the studied vehicle, which is 8% higher than using conventional fuzzy learning in the WLTC condition.
- In the study under RTS-95 cycle representing new legislation conditions, the proposed DDPG–ANFIS network benefits from online reinforcement signals so that it achieved 38% higher CU compared to the ANFIS-only network.
- In five SRDCs, the proposed DDPG–ANFIS network achieves higher control utilities, which is up to 138% higher than the ANFIS-only network and 5.2% higher than the DDPG-only network.
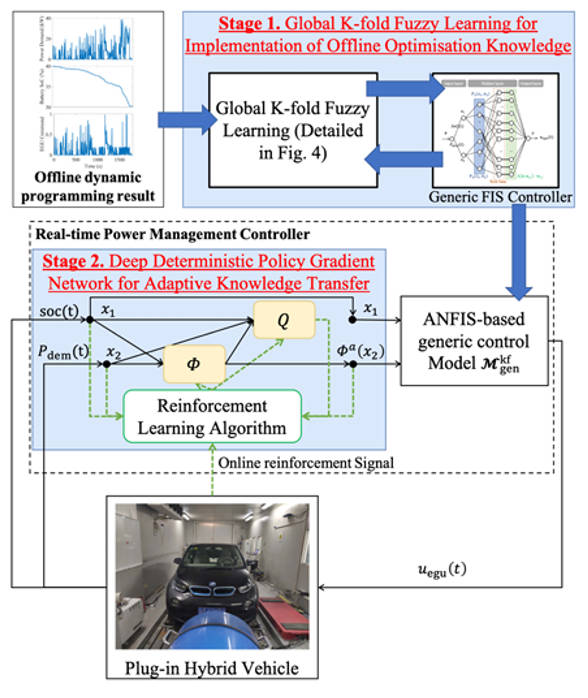
Fig.3-34. Adaptive learning network in power management of the plug-in hybrid vehicle.
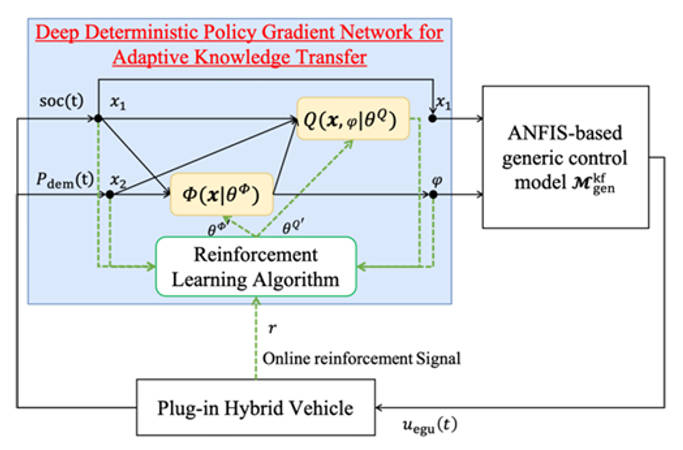
Fig. 3-35. DDPG network for adaptive knowledge transfer.
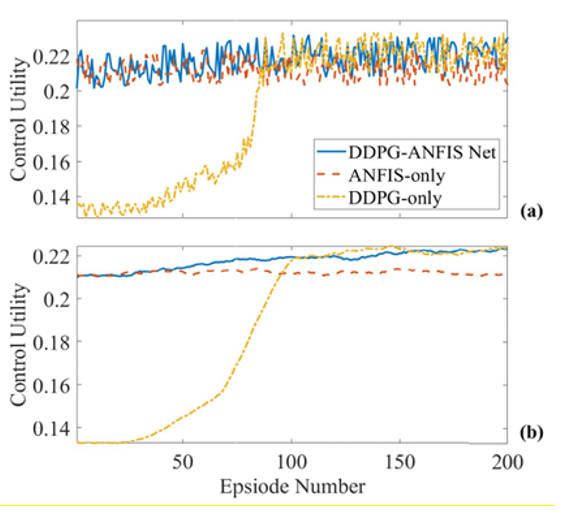
Fig. 3-35. Learning Performance in the SRDC-1. (a) Row data. (b) Moving average of every 30 episodes.