

Dr Beth Jelfs
Assistant Professor
Staff profile for Dr Beth Jelfs.

Signal processing is a fundamental driving force in many modern sensor technologies and applications. It is the bridge that links the sensory information with obtaining meaningful answers such as detection, tracking, classification or action planning.
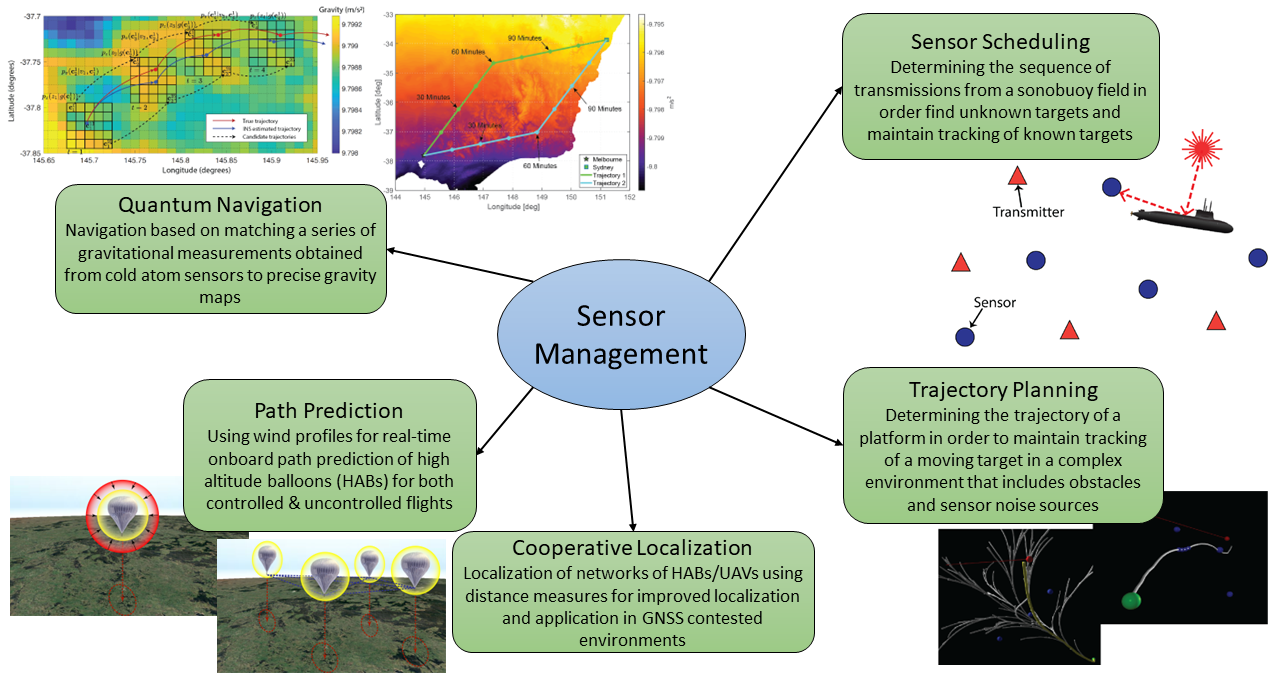
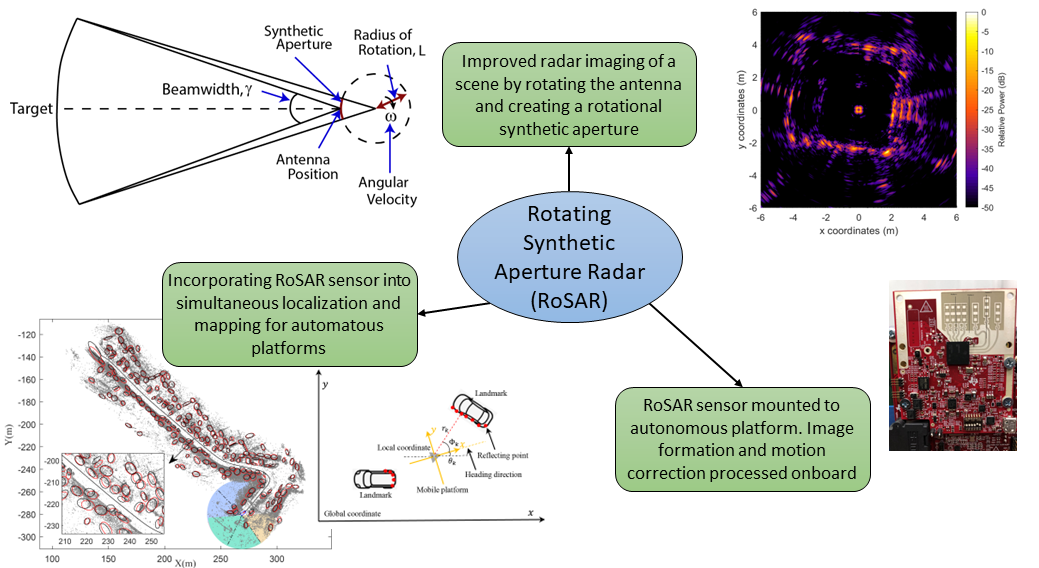
We in MISL have a wide range of expertise covering all aspects of signal and image processing. Examples include signal alignment for time delay estimation and image registration; modelling and analysing dynamic, non-stationary systems and phenomena; radar signal processing and radar image formation; sensor management for scheduling and path planning tasks; sparse parameter estimation for signal and image reconstruction.
Assistant Professor
Staff profile for Dr Beth Jelfs.

Assistant Professor in Applied Signal Processing
Profile of Dr Christopher Gilliam, Electronic, Electrical and Systems Engineering, University of Birmingham

Chair in RF and Space Sensing
Staff profile for Professor Marco Martorella.

Chair in Pervasive Sensing
Professor Gashinova's broad area of research interests includes bistatic radars, signal processing, theoretical modelling in propagation and numerical techniques for microwave structures modelling and design.

Chair in RF Sensing Systems
Profile of Dr Michail Antoniou, Electronic, Electrical and Systems Engineering, University of Birmingham

Hui-Lin Cheng


Jamal Esmaelpoor (University of Melbourne & Bionics Institute)
Kaichao Wu (RMIT University & Shantou University)
Robert Chi Sang Choy (RMIT University & Shantou University)
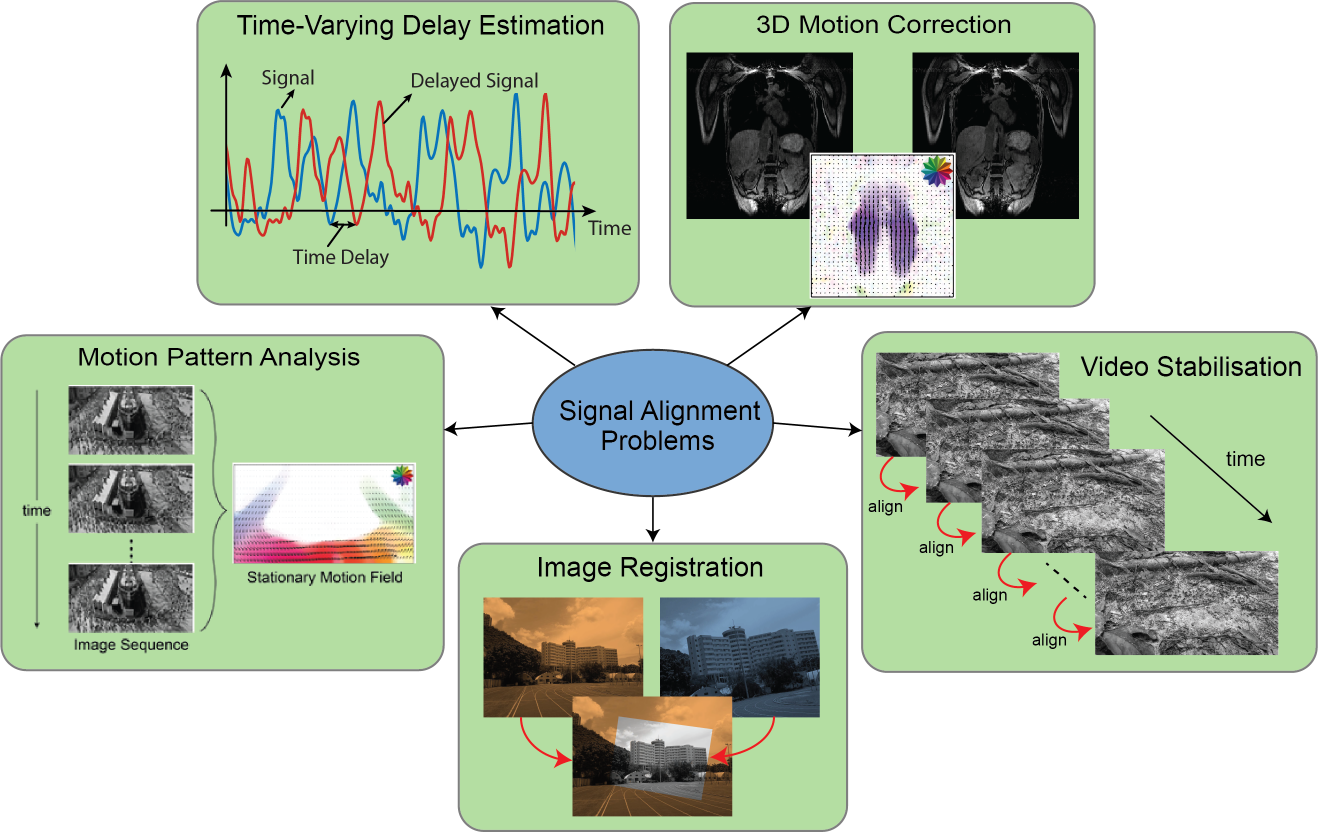
The estimation of a geometric transformation that aligns two or more signals is a problem that has many applications in signal processing. The problem occurs when signals are either recorded from two or more spatially separated sensors or when a single sensor is recording a time-varying scene. Examples of fundamental tasks that involve this problem are shown in the figure below. In this project we estimate the transformation between these signals using a novel local all-pass (LAP) filtering framework.
For more information on some of our current work please visit research pages of:

